|
去年8月,扬天科技获得由联想创投领投的5000万元Pre-A轮融资,该笔融资主要用于扬天“不锐”系列轻型协作机器人的核心技术研发、市场渠道推广以及产品生产线建设方面。
扬天科技“不锐”协作机器人系列产品以精度高、节能、易操作、易维修的特点几乎能让任何作业实现自动化,从胶合、焊接、打磨、安装、紧固、抓取、放置和包装,简化和优化整个生产作业流程。
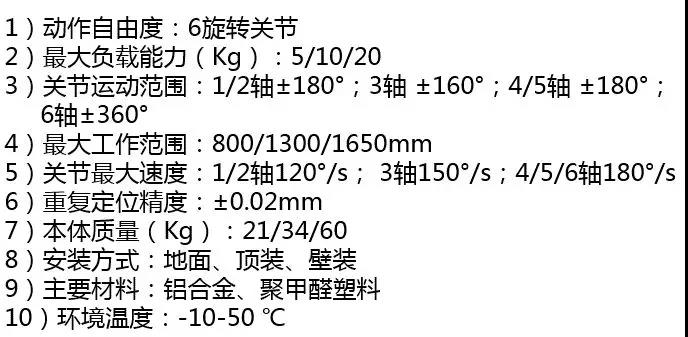
该系列产品采用哈默纳科组合型减速机,松下A6系列交流伺服电机,通过将6自由度机器人的6个关节进行模块化结构设计,采用中空串联机械臂及内部走线形式,构成了一种轻型模块化机器人,具有操作空间大、动作灵活、负载/自重比小的特点,目前已经有5kg、10kg、20kg产品规格。
从结构上来看,“不锐”系列机器人示教器采用KEBA T70Q示教器,示教器与控制器之间通过EtherNet进行连接;所有程序、数据位于控制器上,开机后示教器与控制器进行同步,读取内容;驱动器采用北京清能德创的一体化的伺服驱动CoolDrive R系列伺服;控制软件结构层次上分为系统软件和任务程序。 机械臂主要参数: 技术特点: 1、中空人机协作机器人模块化关节设计。采用集成式中空关节设计,主要由伺服电机、失电制动器(又称刹车或抱闸)、带轮、齿形带、张紧机构、减速器、支架、关节外壳、关节后盖构成。
2、机器人拓扑构型设计,具有散热功能的关节外壳设计与制造。根据机器人正交和非正交结构,应用不同类型的模块化关节搭建不同构型机器人。
3、基于EtherCAT通讯的机器人控制系统研究。提出了基于EtherCAT工业以太网开放式机器人控制系统结构;采用基于标准Windows的TwinCAT、RTX、CodeSys等构建控制系统软件。
4、无传感器拖动示教和碰撞检测研究。基于拖动示教功能研究以及动力学预估和补偿的碰撞检测方法研究;通过运动学和动力学的计算,估算关节力矩。比较实际关节力矩和估算关节力矩,实现拖动示教和碰撞停止。
5、机器人本体快速标定和测量技术研究。研究采用经纬仪、三坐标测量仪、激光跟踪仪、拉线传感器等工具对其进行标定;通过实际位置误差以及误差系数矩阵,反求参数误差,完成对机器人连杆参数的补偿;对标定后的机器人,通过多拉线传感器进行空间轨迹测量研究。
2018年8月2日,由高工机器人举办的“2018高工机器人集成商大会暨十佳集成商颁奖典礼”将在东莞松山湖举行,全球数百家机器人本体企业、集成商及终端客户企业将共襄盛会。作为大会特邀合作伙伴,扬天科技将在集成商大会中亮相,扬天科技常务副总经理张红宇将发表《轻型协作机器人企业未来的发展之路》的主题演讲,进一步阐述轻型协作机器人未来的发展趋势和企业的应对之策。
| 





 吊带美女桌面壁纸,
吊带美女桌面壁纸, 大胸美女图片,清纯
大胸美女图片,清纯 2023全新美女姐姐
2023全新美女姐姐 四个高峰:微信每天
四个高峰:微信每天 入秋先养肺!5个养
入秋先养肺!5个养 最需要教育的不是孩
最需要教育的不是孩



 发表于 2018-8-4 22:01:32
发表于 2018-8-4 22:01:32